近日,武汉大学工业科学研究院薛龙建教授课题组研制出一种可精准控制方向和速度、综合性能极佳的迷你软体机器人,预期可在废墟狭缝、生物体内完成各种复杂作业。
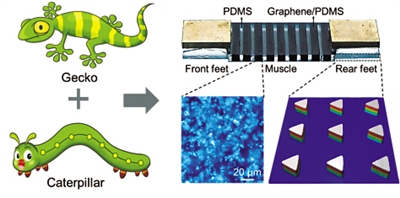
科研人员尝试在机器人上引入仿壁虎脚趾刚毛的足部,使之具有良好表面适应性,机器人的步态借鉴了壁虎脚的取向黏附能力和尺蠖前后足交替运动模式,交替的开关光照驱动它不断向前运动。据新华社
借鉴壁虎脚黏附性能和尺蠖运动步态设计的软体机器人。